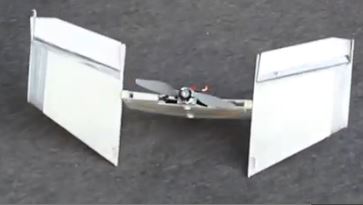
This flying robot can use its wings to navigate on the ground, even over rough terrain! Its creator, the Laboratory of Intelligent Systems, notes, “The robot is capable of walking with different gaits, it can move on different surfaces, it can overcome high obstacles, and can also navigate in rough terrains. The robot presented in the video is the first prototype of the DALER (Deployable Air Land Exploration Robot) Project. This project aims at designing robots for applications such as exploration, search-and-rescue, or monitoring of the environment; where robots have to deal with very complex terrains, such as semi-collapsed buildings, deep caverns, or forests with a lot of vegetation. Autonomous robots are appealing for these tasks due to their ability to explore areas that are risky and inaccessible to humans. However, most existing mobile robots use only one single locomotion strategy, such as rolling, walking, flying, hovering, climbing, swimming, crawling, or jumping. Using only one locomotion strategy limits their flexibility and adaptability to different environments. In a search-and-rescue scenario there is a need to fly quickly over extended areas, thereby the use of a winged robot is interesting. However, careful exploration in confined environments or near the ground is challenging for flying robots and terrestrial locomotion is more energy efficient over short distances. For these reasons, a robot capable of ground locomotion and of flying-hovering locomotion is well suited to navigate in complex environments. In this project we propose to use a new approach, which we call ”Adaptive Morphology”, where parts of the structure of a robot are shared between the different modes of locomotion, instead of simply adding a second locomotion structure to an existing robot. Moreover, the structure could self-adjust its shape to adapt to the locomotion mode and the efficiency of locomotion in each mode of locomotion can be improved through adaptive morphology suitable for that mode. We aim to make adaptive deployable wings for improving the mobility of a flying robot; their shape could be adaptively modified to augment efficiency of forward flight, hover flight, and displacement on the ground. For example, wings could be fully deployed for flying outdoors and reduced for hover flight and ground modes.”
Wing walking (really!)